TERMORREGULACION
TEMPERATURA CORPORAL NORMAL
El ser humano es un animal homeotermo que en condiciones fisiológicas normales mantiene una temperatura corporal constante y dentro de unos límites muy estrechos, entre 36,6 +/- 0,38ºC, a pesar de las amplias oscilaciones de la temperatura ambiental. Esta constante biológica se mantiene gracias a un equilibrio existente entre la producción de calor y las pérdidas del mismo y no tiene una cifra exacta. Existen variaciones individuales y puede experimentar cambios en relación al ejercicio, al ciclo menstrual, a los patrones de sueño y a la temperatura del medio ambiente. La temperatura axilar y bucal es la más influida por el medio ambiente, la rectal puede ser modificada por el metabolismo del colon y el retorno venosos de las extremidades inferiores y la timpánica por la temperatura del pabellón auricular y del conducto auditivo externo. También existen diferencias regionales importantes, pudiendo encontrarse diferencias de hasta 10-15ºC entre la existente en los órganos centrales (corazón, cerebro y tracto gastrointestinal) y las puntas de los dedos. La medición más fiable es la tomada en el esófago (en su cuarto inferior), siendo ésta especialmente útil en las situaciones de hipotermia, ya que presenta la ventaja de modificarse al mismo tiempo que la de los territorios más profundos del organismo. Recientes trabajos realizados sobre pacientes hipotérmicos víctimas de sepultamiento por avalanchas han demostrado también la utilidad de la medición de la temperatura timpánica en estas situaciones.
CONTROL DE LA TEMPERATURA CORPORAL
El mantenimiento de una temperatura corporal dentro de los límites anteriormente expuestos solo es posible por la capacidad que tiene el cuerpo para poner en marcha una serie de mecanismos que favorecen el equilibrio entre los que facilitan la producción de calor y los que consiguen la pérdida del mismo. Estos mecanismos se exponen a continuación.
MECANISMOS DE PRODUCCION DE CALOR
Las principales fuentes de producción basal del calor son a través de la termogénesis tiroidea y la acción de la trifosfatasa de adenosina (ATPasa) de la bomba de sodio de todas las membranas corporales. La ingesta alimentaria incrementa el metabolismo oxidativo que se produce en condiciones basales. Estos mecanismos son obligados en parte, es decir, actúan con independencia de la temperatura ambiental, pero en determinadas circunstancias pueden actuar a demanda si las condiciones externas así lo exigen.
La actividad de la musculatura esquelética tienen también una gran importancia en el aumento de la producción de calor . La cantidad de calor producida puede variar según las necesidades. Cuando está en reposo contribuye con un 20%, pero durante el ejercicio esta cifra puede verse incrementada hasta 10 veces más. El escalofrío es el mecanismo más importante para la producción de calor y este cesa cuando la temperatura corporal desciende por debajo de los 30ºC. El metabolismo muscular aumenta la producción de calor en un 50% incluso antes de iniciarse el escalofrío, pero cuando éste alcanza su intensidad máxima la producción corporal de calor puede aumentar hasta 5 veces lo normal .
Otro mecanismo de producción de calor es el debido al aumento del metabolismo celular por efecto de la noradrenalina y la estimulaciónón simpática. Este mecanismo parece ser proporcional a la cantidad de grasa parda que existe en los tejidos. El adipocito de la grasa parda, que posee una rica inervación simpática, puede ser activado por los estímulos procedentes del hipotálamo y transmitidos por vía simpática con producción de noradrenalina, la cual aumenta la producción de AMP-cíclico, que a su vez activa una lipasa que desdobla los triglicéridos en glicerol y ácidos grasos libres. Estos pueden volver a sintetizar glicéridos o bien ser oxidados con producción de calor . Este mecanismo, que tiene una importancia relativa en el adulto por su escasa cantidad de grasa parda, no es así en los recién nacidos y lactantes donde tiene una importancia capital, ya que la grasa parda puede llegar a suponer hasta un 6% de su peso corporal y son incapaces de desarrollar escalofríos o adoptar una postura protectora ante el frío.
El calor absorbido por la ingesta de alimentos y bebidas calientes también puede producir un mínimo aumento de calor, lo mismo que las radiaciones captadas por el cuerpo y procedentes fundamentalmente del sol (ultravioletas) o de lugares próximos (infrarrojos).
MECANISMOS DE PERDIDA DE CALOR
El calor del cuerpo se pierde por radiación, convección, conducción y evaporación y pueden explicarse de la manera siguiente.
Radiación.
La pérdida de calor por radiación significa pérdida de calor en forma de rayos infrarrojos, que son ondas electromagnéticas. Es decir, existe un intercambio de energía electromagnética entre el cuerpo y el medio ambiente u objetos más fríos y situados a distancia. La cantidad de radiación emitida varía en relación al gradiente que se establece entre el cuerpo y el medio ambiente. Hasta el 60% de la pérdida de calor corporal puede tener lugar por este mecanismo.
Convección.
Es la transferencia de calor desde el cuerpo hasta las partículas de aire o agua que entran en contacto con él. Estas partículas se calientan al entrar en contacto con la superficie corporal y posteriormente, cuando la abandonan, su lugar es ocupado por otras más frías que a su vez son calentadas y así sucesivamente. La pérdida de calor es proporcional a la superficie expuesta y puede llegar a suponer una pérdida de hasta el 12%.
Conducción.
Es la perdida de pequeñas cantidades de calor corporal al entrar en contacto directo la superficie del cuerpo con otros objetos más fríos como una silla, el suelo, una cama, etc. Cuando una persona desnuda se sienta por primera vez en una silla se produce inmediatamente una rápida conducción de calor desde el cuerpo a la silla, pero a los pocos minutos la temperatura de la silla se ha elevado hasta ser casi igual a la temperatura del cuerpo, con lo cual deja de absorber calor y se convierte a su vez en un aislante que evita la pérdida ulterior de calor. Habitualmente, por este mecanismo, se puede llegar a una pérdida de calor corporal del 3%. Sin embargo, este mecanismo adquiere gran importancia cuando se produce una inmersión en agua fría, dado que la pérdida de calor por conductividad en este medio es 32 veces superior a la del aire.
Evaporación.
Es la pérdida de calor por evaporación de agua. En lo dicho anteriormente sobre la radiación, convección y conducción observamos que mientras la temperatura del cuerpo es mayor que la que tiene el medio vecino, se produce pérdida de calor por estos mecanismos. Pero cuando la temperatura del medio es mayor que la de la superficie corporal, en lugar de perder calor el cuerpo lo gana por radiación, convección y conducción procedente del medio vecino. En tales circunstancias, el único medio por el cual el cuerpo puede perder calor es la evaporación, llegando entonces a perderse más del 20% del calor corporal por este mecanismo. Cuando el agua se evapora de la superficie corporal, se pierden 0,58 calorías por cada gramo de agua evaporada. En condiciones basales de no sudoración, el agua se evapora insensiblemente de la piel y los pulmones con una intensidad de 600 ml al día, provocando una pérdida contínua de calor del orden de 12 a 16 calorías por hora. Sin embrago, cuando existe una sudoración profusa puede llegar a perderse más de un litro de agua cada hora. El grado de humedad del aire influye en la pérdida de calor por sudoración y cuanto mayor sea la humedad del medio ambiente menor cantidad de calor podrá ser eliminada por este mecanismo. Con la edad aparece una mayor dificultad para la sudoración, con la consiguiente inadaptación a las situaciones de calor, hecho similar que se reproduce en algunas personas con alteración de las glándulas sudoríparas. Por contra, existen determinadas enfermedades de la piel que favorecen la pérdida de agua a través de la misma.
MECANISMOS MODERADORES DE PRODUCCION Y PERDIDA DE CALOR
Están basados fundamentalmente en la capacidad intelectual mediante la cual se modifica la vestimenta, se aumenta o disminuye la actividad física y se busca un medio ambiente confortable en relación a la temperatura ambiental. Otro mecanismo muy desarrollado en los animales, como la erección pilosa, apenas tiene importancia en el hombre como mecanismo moderador del calor corporal.
REGULACION CENTRAL DE LA TEMPERATURA. EL "TERMOSTATO HIPOTALAMICO"
El control de la temperatura corporal, que integra los diferentes mecanismos de producción y pérdida de calor con sus correspondientes procesos físicos y químicos, es una función del hipotálamo. En concreto, en la región preóptica del hipotálamo anterior se ha situado al centro que regula el exceso de calor y en el hipotálamo posterior al centro de mantenimiento del calor que regula el exceso de frío y la pérdida de calor. Esta teoría dualista es bastante simplista para ser plenamente aceptada y, al parecer, existen complejos y múltiples circuitos entre estos dos centros hipotalámicos que todavía no se han descubierto. No obstante, el sistema regulador de la temperatura es un sistema de control por retroalimentación negativa y posee tres elementos esenciales:
1) Receptores que perciben las temperaturas existentes en el núcleo central.
2) Mecanismos efectores que consisten en los efectos metabólicos, sudomotores y vasomotores.
3) Estructuras integradoras que determinan si la temperatura existente es demasiado alta o demasiado baja y que activan la respuesta motora apropiada.
Gran parte de la señales para la detección del frío surgen en receptores térmicos periféricos distribuídos por la piel y en la parte superior del tracto gastrointestinal. Estos receptores dan origen a estímulos aferentes que llegan hasta el hipotálamo posterior y desde allí se activa el mecanismo necesario para conservar el calor: vasoconstricción de la piel por aumento de la actividad simpática y piloerección (de escasa importancia). Cuando el hipotálamo posterior no recibe estímulos de frío cesa la vasoconstricción simpática y los vasos superficiales se relajan. Si la temperatura es muy baja y es necesario aumentar la producción de calor, las señales procedentes de los receptores cutáneos y medulares estimulan el "centro motor primario para el escalofrío", situado en la porción dorsomedial del hipotálamo posterior, cerca de la pared del tercer ventrículo, y de allí parten toda una serie de estímulos que aumentan progresivamente el tono de los músculos estriados de todo el organismo y que cuando alcanza un nivel crítico dan origen el escalofrío. Además, el enfriamiento del área preóptica del hipotálamo hace que el hipotálamo aumente la secreción de la hormona liberadora de la tirotropina (TRH), ésta provoca en la adenohipófisis una liberación de la hormona estimuladora del tiroides o tirotropina (TSH), que a su vez aumenta la producción de tiroxina por la glándula tiroides, lo que estimula el metabolismo celular de todo el organismo y aumenta la producción de calor.
Cuando se calienta el área preóptica, el organismo comienza de inmediato a sudar profusamente y al mismo tiempo se produce una vasodilatación en la piel de todo el cuerpo. En consecuencia, hay una reacción inmediata que causa pérdida de calor y ayuda al organismo a recuperar su temperatura normal.
En definitiva, el centro de regulación de la temperatura está situado en el hipotálamo que parece ser el integrador común de la información aferente y eferente. El hipotálamo no sólo es sensible a los impulsos neuronales eferentes, sino también directamente a las alteraciones térmicas. Incluso en temperaturas ambientales normales, si se coloca una sonda en el hipotálamo de un animal de experimentación y se enfría, el animal responderá con vasoconstricción periférica y escalofrío.
También se ha descrito, que las monoaminas pueden convertirse en moduladores del termostato hipotalámico . Feldberg y Myers , describieron en 1963 la importancia que las aminas pueden llegar a tener en la regulación hipotalámica. Experimentos en animales han demostrado cambios de temperatura cuando se inyectan aminas como la levodopa o la dopamina en el tercer ventrículo, adyacente al hipotálamo. En las ratas, por ejemplo, inyecciones de 5-hidroxitriptófano, dopamina, levodopa o apomorfina producen hipotermia, mientras inyecciones de noradrenalina, adrenalina o isoproterenol producen hipertermia . Sin embargo las respuestas pueden variar según la especie animal de que se trate. En los humanos, descensos de los niveles dopaminérgicos pueden producir hipotermia. Los papeles que puedan desarrollar agentes como el 5-hidroxitriptófano, la histamina o la adrenalina está todavía por dilucidar.
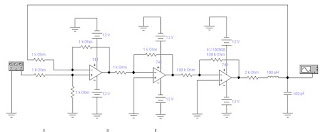
DIAGRAMA DE BLOQUES DEL SISTEMA

fig1
MODELAMIENTO MATEMATICO
En el modelado matemático deben considerarse las ecuaciones de equilibrio térmico en cada una de las tres zonas, lo cual permitirá relacionar analíticamente cada una de las variables consideradas

fig2
Las ecuaciones de la regulación de la térmica son las siguientes
Núcleo:

(1)
Músculos:

(2)
Piel:

(3)
Donde:m = masac = calor especificoӨ = temperaturaMm = metabolismo del escalofrío muscularMb = metabolismo basalMv = metabolismo del ejercicio muscular voluntarioFc = tasa de transferencia de calor por convecciónFe = tasa de transferencia de calor por evaporaciónFr = tasa de perdida de calor por respiraciónFrad = tasa de transferencia de calor por radiaciónq = flujo de calor entre dos de las zonas consideradas y los subíndices n, m, p indican núcleo, músculo y pie respectivamente.

(4)
Donde:K = la conductividad térmica y el subíndice y se refiere a la acción vasomotora.
La tasa de transferencia de calor por convección puede expresarse empleando la ley de Newton

(5) Donde:hp = coeficiente de transferencia de calor por convecciónӨa = temperatura ambientey la tasa de transferencia de calor por radiación mediante la ley de Stefan-Boltzmann

(6)
Donde:
σ = constante de Stefan-Boltzmann
A’ = superficie radiante efectiva
Өr = temperatura del recinto
La fig2 presenta el diagrama de bloques del cuerpo como sistema controlado en la regulación de la temperatura corporal y se deduce de las ecuaciones (1) a (6).








 En M- file de Matlab tenemos:
En M- file de Matlab tenemos:
























{kind=link}